Continuamos con la segunda parte de nuestro tutorial ¿Cómo simular un sistema masa resorte con Simulink?, en esta ocasión presentaremos la segunda parte del video, en caso que no hayas visto la primera parte te invito a que sigas el siguiente enlace
En esta ocasión busco mostrar la flexibilidad de Simulink para integrar diferentes sistemas y diferentes formas de crear los modelos, en este caso utilizaré
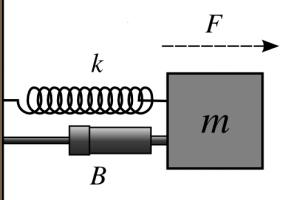
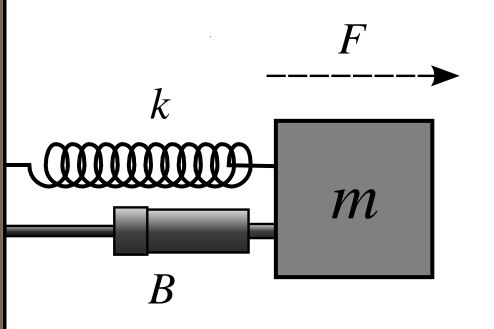
primero una función de transferencia, que es aplicar la transformada de Laplace de la ecuación diferencial, es muy utilizada para la implementación de controladores. Luego utilizaré los bloques de modelamiento físico, para hacer una representación en forma de componentes físicos. Por lo tanto los bloques integradores y las ganancias, serán reemplazados por los elementos físicos de la planta, es decir: un resorte, una masa y un amortiguador. Y veremos que el comportamiento del modelo de la planta corresponde al mismo del modelo anterior.
Lo que es bastante interesante dado que permite una flexibilidad a la hora de modelar sistemas, dependiendo de las condiciones o del tipo de limitaciones que se tengan. Y dado que tengo el mismo modelo puedo entonces utilizar el mismo controlador.